Celular y WhatsApp:
84 4427 7043
Correo electrónico:
gilflores@flobaautomation.com.mx
Si lo desea, también puede ponerse en contacto con nosotros a través de nuestro formulario de contacto.


BLOG Informativo
En esta parte podras encontrar noticias interesantes sobre: robótica, automatizaciones, mejora continua, ingeniería industrial, seguridad, ergonomía y muchos temas más.
Puedes dar clic en la imagen para ver el artículo completo.
Dual Check Safety (DCS) Explained. by FANUC Robots
 Setup Using Robot Teach Pendant
Setup Using Robot Teach Pendant
Dual Check Safety (DCS) Explained
by FANUC Robots
ABSTRACT
FANUC’s Dual Check Safety (DCS) control architecture includes safety functions that can be used by the robot cell system designer/programmer to reduce floor space requirements and make fenceless
robot cells more feasible.
Position Control of Hybrid Pneumatic–Electric Actuators Using Discrete-Valued Model-Predictive Control.
 Design of the hybrid actuator
Design of the hybrid actuator
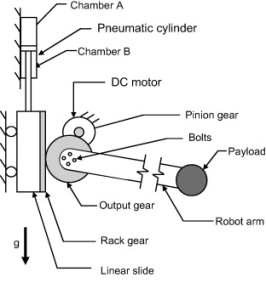
Position control of hybrid pneumatic–electric actuators using discrete-valued model-predictive control
by Gary M. Bone, Mantian Xue, Justin Flett
ABSTRACT
The design, modeling and position control of a novel hybrid pneumatic–electric actuator for applications in robotics and automation is presented. The design incorporates a pneumatic cylinder and DC
motor connected in parallel. By avoiding the need for a high ratio transmission, the design greatly reduces the mechanical impedance that can make collisions with conventionally actuated robot arms
dangerous. A novel discrete-valued model-predictive control (DVMPC) algorithm is proposed for controlling the position of the pneumatic cylinder with inexpensive on/off solenoid valves. A variant of
inverse dynamics control is proposed for the DC motor. A prototype was built for validating the actuator design and control algorithms. It is used to rotate a single-link robot arm. The actuator
inertia and static friction torque values for the prototype were only 0.6% and 4%, respectively, of the values found for a comparable actuator from an industrial robot. Simulation results for
position control of pneumatic actuators with different valve speeds and friction coefficients show that the DVMPC algorithm outperforms a sliding mode control algorithm in terms of position error and
expected valve life. Experimental results are presented for vertical rotary cycloidal trajectories. Even with the poor quantization caused by the on/off valves, the pneumatic cylinder controlled by
the proposed DVMPC algorithm achieved a 0.7% root mean square error (RMSE) and a 0.25% steady-state error (SSE). With the addition of the DC motor to form the hybrid actuator, the RMSE and SSE were
reduced to 0.12% and 0.04%, respectively. By incorporating a novel estimation algorithm, the system was made robust to an unknown payload.
7 ways to make sure your motor measures up
7 ways to make sure your motor measures up
By Control Design
Are you taking care of your motor? Are you avoiding failures? Are you practicing energy efficiency? Don't suffer from total motion control failure. Check out our roundup of helpful motor articles to
make sure your motor measures up.
Machine Vision Technology Developments Let Industrial Robots "See" and Do More
Machine Vision Technology Developments Let Industrial Robots "See" and Do More
Leslie Gordon
Machine vision systems have long played an important role in inspecting, identifying and guiding parts. Current systems provide an increasingly sophisticated integration of machine vision and
robotics, boosting the number of automation options that can help find defects, sort products and complete other tasks faster and more efficiently.
Robots Become Routine in Machine Designs
Robots Become Routine in Machine Designs
Jim Montague
Evolved from exotic add-ons with separate controls to regular-guy devices serving alongside other mainstream machine components using common controls, robots are well-integrated and ready to
cooperate